„Experimentelle Fähigkeitsentwicklung ist die Anpassung des personellen, materiellen oder ausbildungsmäßigen Zustandes der Streitkräfte zur Sicherstellung der erforderlichen Einsatzbereitschaft auf Basis vorangegangener Experimentalphasen.“
Digital Headquarters
Enabling an Inside View into the Urban Environment

The S3OMT (Triple-S) Operations Mission Tool is a key resource in mission planning within urban environments. It enables an inside view into the environment on all three levels of movement thereby improving our spatial understanding.
Project NIKE BLUETRACK successfully finished!


The NIKE research and development program (www.milak.at/nike) deals with all questions of operational management in underground service infrastructure (traffic, energy, various supply and disposal services), whose trouble-free operation guarantees the functioning of public life. However, the lack of lighting and ventilation and the wide ramifications of the tunnel systems make this task difficult. In addition, a potential adversary could specifically exploit these circumstances as part of a hybrid attack. An exact determination of the location of one's own forces is therefore a decisive prerequisite for the successful planning and implementation of underground operations. Above all, so-called blue-on-blue situations, i.e. firing on one’s own forces, should be avoided in this way.
NIKE BLUETRACK deals with this precise navigation in underground structures, which is much more demanding than above ground due to the omission of GNSS (Global Satellite Systems) for positioning. As part of the project, a blue force tracking system is being developed that visualizes the positions of the own armed forces on the map of the Subsurface Operations Mission Tool (SOMT) in real time. A fast and correct representation of the ongoing operation facilitates the decision-making process and thus increases the safety of the military/emergency services and civilians involved.
The goal was to develop a reliable and robust navigation system that, in the event of an attack, would be able to cope with all the challenges related to the changing environment. It is based on the fusion of a dual foot-mounted INS (inertial navigation system) with UWB (ultra-wideband) distance measurements and a 3D tunnel model.
Since no usable infrastructure or prior map information can be assumed, the Fast Tunnel Modeling Tool (FTMT) was developed for the rapid generation of maps during the mission.
The soldiers are equipped with two IMUs on each foot and an UWB tag. In addition, UWB anchors are installed in the underground structure, whose coordinates are estimated over time from the positions of the units moving in the tunnel using a particle filter. With this method, the UWB network can be extended from a previously measured base network (at least 4 anchors with known positions).
The entire navigation algorithm is implemented on the latest Raspberry Pi model and consists of two stages: a zero-velocity-aided INS, which links the information from the two IMUs (first stage) and a particle filter (second stage). The particle filter combines the relative position and heading from the INS, the UWB distance measurements and the map information into a 3D position solution. The entire tracking system works in near real time and enables interoperability with the developed SOMT.
A novel zero-velocity detector - designed for a foot-mounted INS - was introduced that copes with different motion types, such as walking and running. It is based on a gated recurrent unit network that represents an updated form of a recurrent neural network, which recognizes sequential patterns in data. A major advantage of the detector is its invariance to the IMU’s orientation.
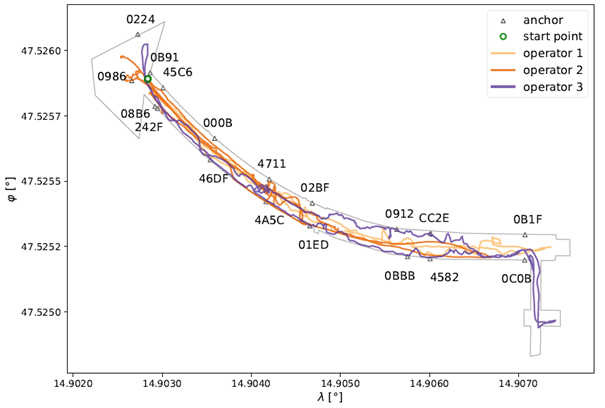
The accuracy of the system was tested in a railway tunnel where metal signs and a train acted as sources of interference. The resulting trajectory was compared to a reference solution obtained with a total station. Despite multipath effects, unfavorable geometry and a limited number of available anchors, the horizontal positioning errors were between 0.7 and 1.5 meters, while the vertical positioning errors were around 1.5 meters (depending on the route). The navigation solution provided robust positioning information even when switching between different motion types and infrastructure setups. The position solutions were also successfully visualized in the SOMT.
The proof-of-concept, i.e. the test of the NIKE BLUETRACK system under real conditions, was carried out as part of the NIKE Research Activity 2022 ("IRON NIKE", July 2022) at the “Zentrum am Berg”. Routes in the front area of the tunnel system achieved more stable solutions, while larger lateral errors occurred near parked busses. The system was not found to be disruptive in real use, but the prototype showed weaknesses in Bluetooth communication and in the stability of the plugs. The battery life of the prototype and the UWB nodes exceeded the user requirements.
Fast Tunnel Modelling Tool bei AGIT 21 vorgestellt
Forschungsgruppe NIKE nimmt bereits zum zweiten Mal an der AGIT teil
Bereits zum zweiten Mal hat die Forschungsgruppe NIKE an der AGIT teilgenommen. Diese Fachkonferenz bezweckt die interdisziplinäre Vernetzung und Weiterbildung im Bereich der Geoinformatik. Im Block „Strategische Anwendungen“ wurde das Fast Tunnel Modelling Tool (FTMT) vorgestellt, welches einen wesentlichen Beitrag zur Bewältigung komplexer Einsätze unter Tage leistet. Es unterstützt die Visualisierung dort, wo keine digitalen Daten vorhanden sind.
Mobiles Wettertor im Test
Erste Versuche im Zentrum am Berg verheißen Erfolg

Im Zentrum am Berg konnte erstmals das mobile Wettertor aufgebaut und getestet werden. Dabei handelt es sich um eine Abgrenzung von verschiedenen Lüftungsabschnitten, die innerhalb von kürzester Zeit errichtet werden kann. Wurde in der ersten Phase lediglich ein Prototyp, bestehend aus Netzen und Seilen, verwendet, so konnte nun das maßangefertigte Modell erfolgreich auf Funktion und Dichtheit geprüft werden.
SubSurface Operations Cell (SSOC)
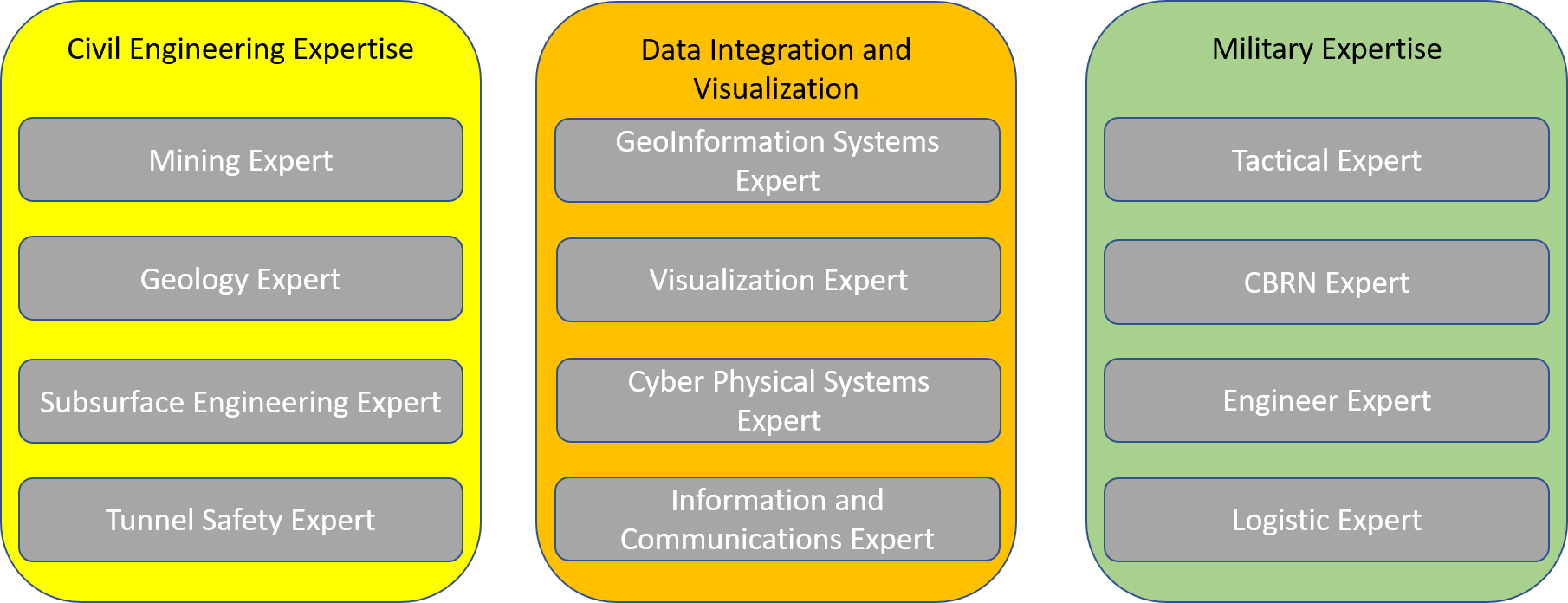
Die SubSurface Operations Cell (SSOC) ist eine Gruppe von zivilen und militärischen Experten für Einsätze unter Tage. Sie entfaltet ihre Stärke durch die wirkungsvolle Kombination von zivilem Ingenieur-Knowhow, militärischer Fachexpertise sowie der Fähigkeit zur raschen Datenintegration und -visualisierung und begleitet sämtliche Forschungs-, Entwicklungs- und Trainingsaktivitäten.